- 연구원소개
- 사업소개
- 훈련과정안내
- 교육신청
- 활동내역
- 지원센터
K-Digital Training
1. 발표 주제
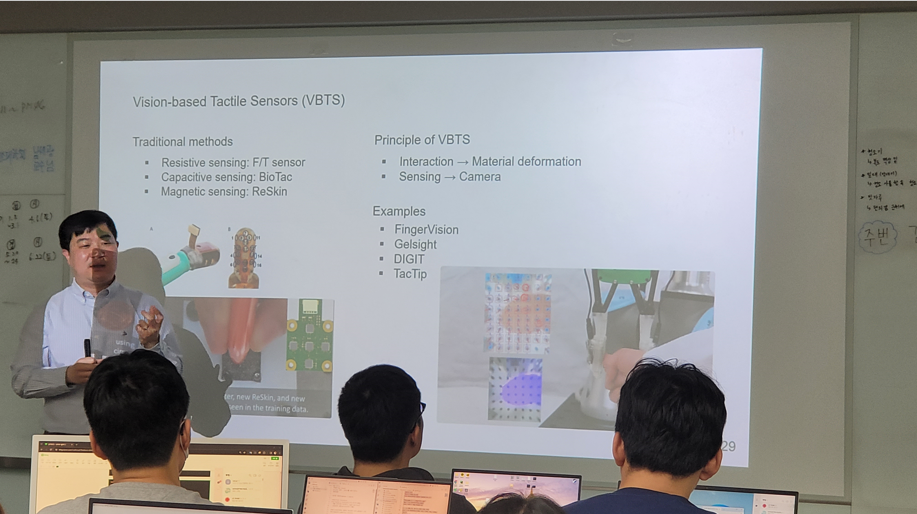
로봇 손기술 향상을위한 글로벌연구 동향과Optical Tactile Sensors 소개
2. Abstract
노동 인구 감소와인건비 증가로인해 사회곳곳에서 로봇의도입이 가속화되고있으며, 많은 공장및 기업에서로봇 활용이증가하고 있습니다. 그러나 작은 물체나형태가 정형화되지않은 물체의조작은 여전히극복해야 할과제로 남아있으며, 전 세계적으로로봇의 손기술(Dexterity) 향상을 위해 연구비와인력이 경쟁적으로투입되고 있습니다. 본 발표는 크게세 부분으로구성되어 있습니다. 첫 번째 부분에서는물체 조작성향상을 위한대표적인 optical tactile sensor인 MIT의 GelSight, Meta의 DIGIT, 그리고 영국 브리스톨대학교의 TacTip에 대해소개하고, 각각의 장단점을설명합니다. 두 번째부분에서는 TacTip의 기본작동 원리를응용하여 개발된 Finray gripper에 대해 소개합니다. 특히 Finray 구조의 기계적 변형을어떻게 간단하고효과적으로 측정할수 있는지에대한 기술적접근을 설명합니다. 마지막 부분에서는 로봇의물체 파지및 조작에관한 전세계적인 연구동향을 소개합니다.
수업 진행 후 질의응답 시간을 통해 교육훈련생들에게 앞으로 ICT 기업의 뱡향성과 미래 인재 역량에 대한 피드백을 해주시고 많은 궁금증을 해소 해주시면서 유익한 강의를 해주셨습니다.